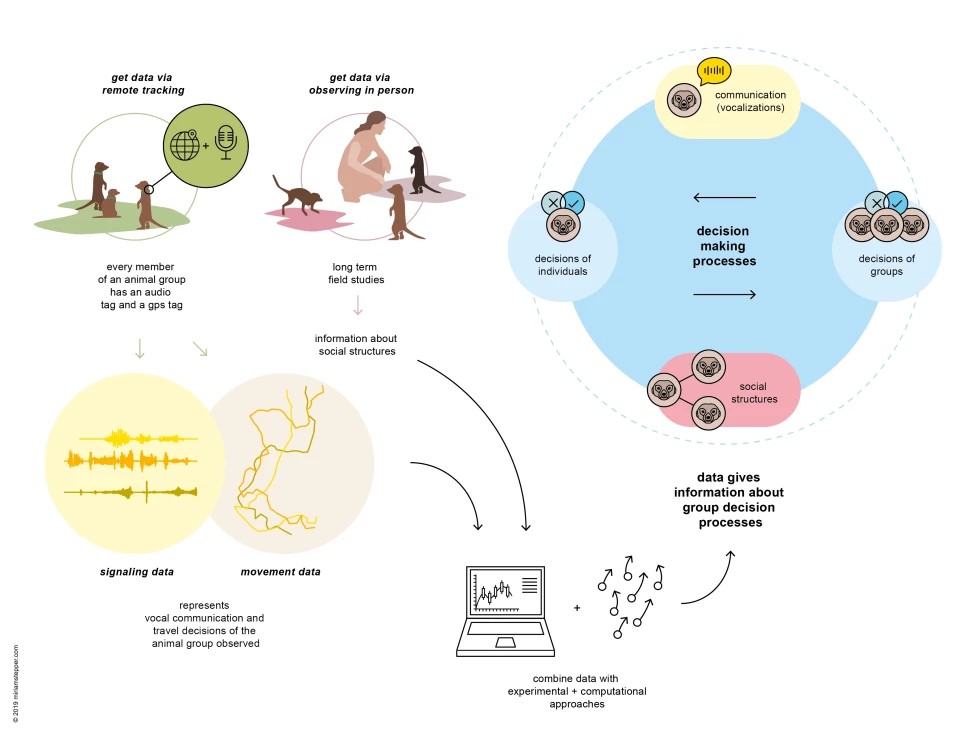
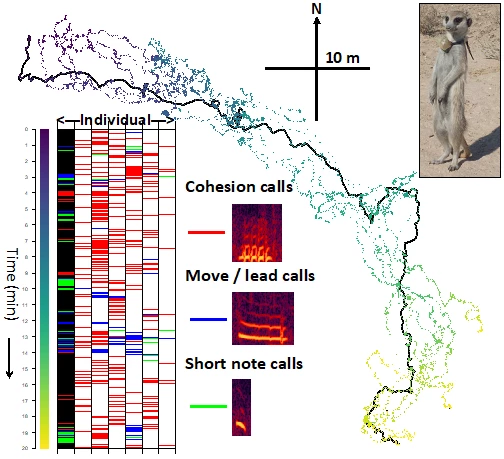
From staying together while on the move to banding together against common threats, many group behaviors require coordination. How do animals achieve such feats? And what role does vocal communication play in mediating these collective behaviors?

Coordinating behavior with others requires communication, and for many animals, including meerkats, vocal communication is key. Our research aims to understand how meerkats coordinate with one another across different behavioral contexts, and in elucidate the role of vocalizations in mediating these behaviors. We combine direct behavioral observations, multi-sensor tracking collars, and field experiments to address this topic.